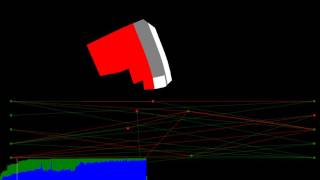
Media Summary: This work provides a complete framework for the simulation, co-optimization, and sim-to-real transfer of the design and control of ... Supplementary video for the paper titled " Inspired by the biomechanics of cheetahs, researchers have developed a new type of
Soft Robots Learn To Crawl - Detailed Analysis & Overview
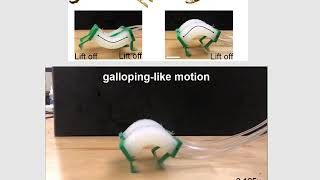
This work provides a complete framework for the simulation, co-optimization, and sim-to-real transfer of the design and control of ... Supplementary video for the paper titled " Inspired by the biomechanics of cheetahs, researchers have developed a new type of In Langley's makerspace lab, researchers are developing a series of soft robot actuators to investigate the viability of A new type of robot combines traditional and 'Doing the robot' on the dancefloor would look more like 'doing the worm' if the dance move was inspired by
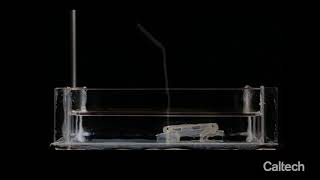
Steerable crawling and lane-changing of the LCE-LM soft robot Supplementary video for paper "Understanding Legged Researchers at Caltech and at Harvard have developed Tirado J., Parvaresh A., Seyidoğlu B., Bedford D.A., Jørgensen J. & Rafsanjani A. (2025) Multimodal Limbless Squish squish squish. Hear that? That's the sound of the Crawli, an itty-bitty A gearbox driven by an external magnetic field can power tiny but powerful